ROS-Noetic 安装教程
预备工作
1.换源
点击“软件与更新”。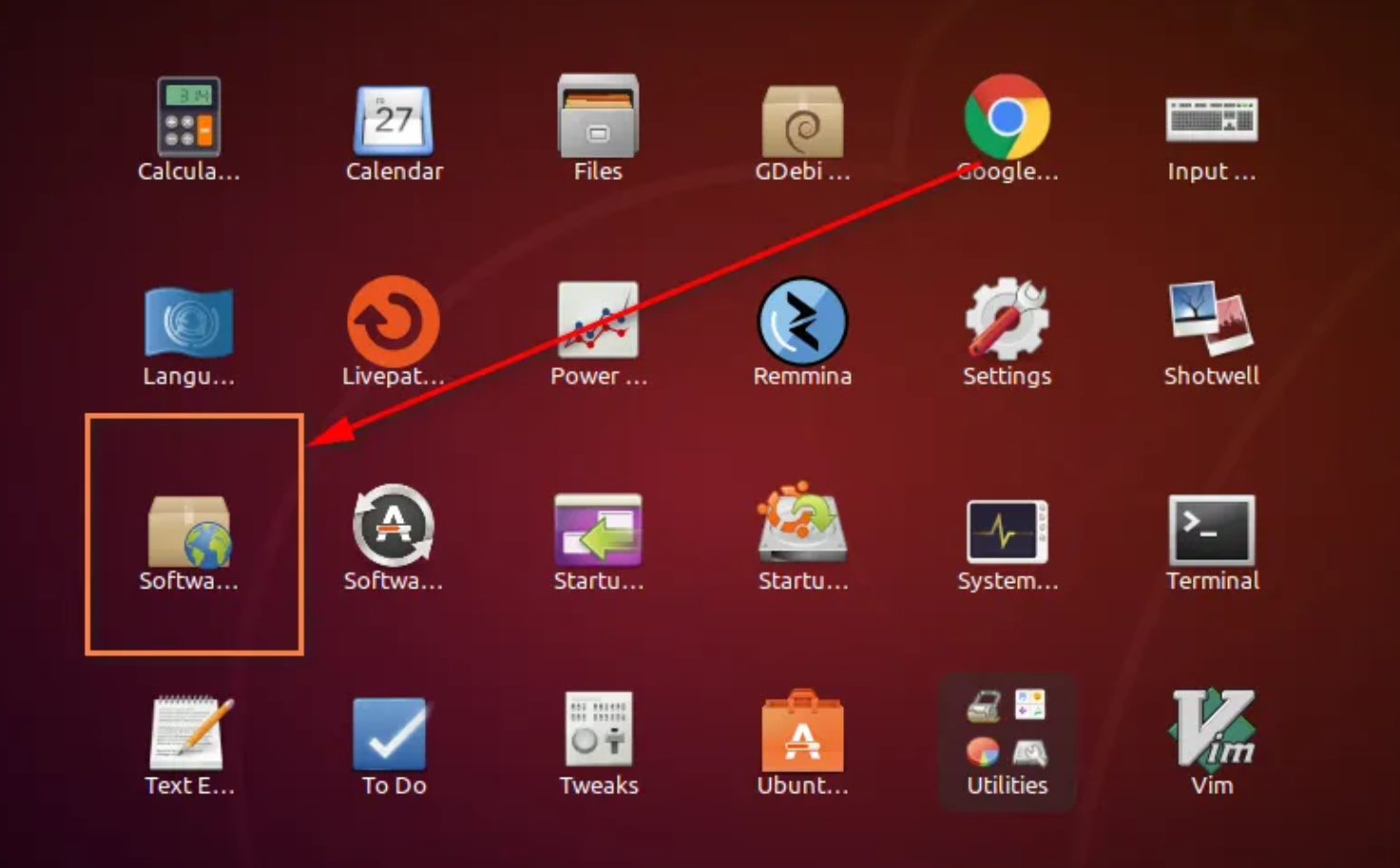
切换为中科大源或清华源。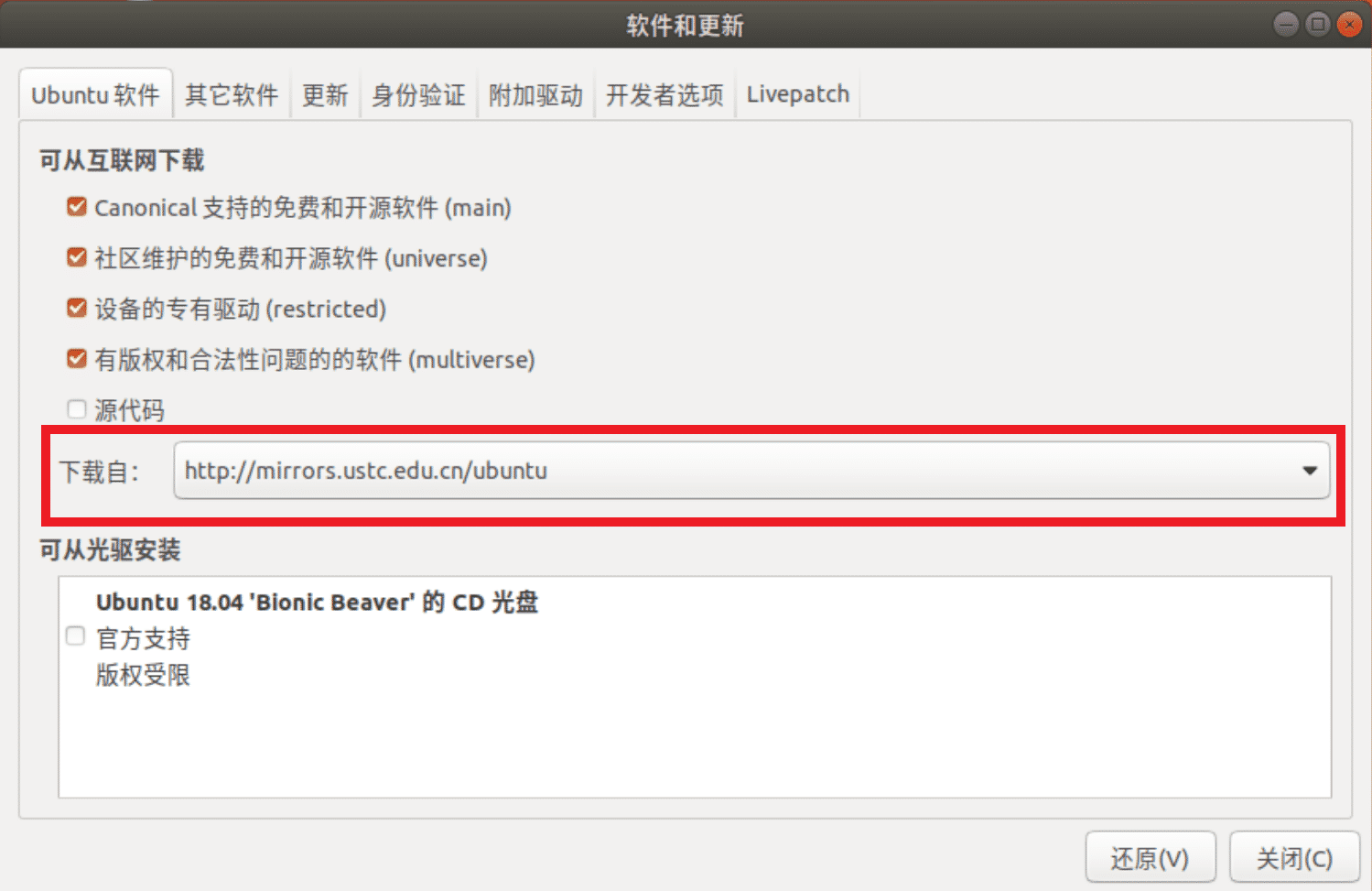
2.勾选下载源
将前四个选项保持勾选。
准备工作
1.设置安装源
官方默认安装源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
或 清华源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
或 中科大源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
PS:1.回车后,可能需要输入管理员密码
2.建议使用国内安装源,速度更快
2.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.更新索引
官方建议使用apt,而非apt-get
sudo apt update
安装ROS
1.安装ros
由于网络因素,若安装失败,可重复调用更新与安装命令直至成功
sudo apt install ros-noetic-desktop-full
2.安装rosinstall工具
安装构建依赖的相关工具
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
3.卸载ros
我只是写在这里教你怎么卸载 并不是叫你卸载 |·ω·`)
sudo apt remove ros-noetic-*
配置ROS
1.配置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
2.初始化rosdep
sudo apt-get install python3-pip
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
测试ROS
开一新终端:
roscore
再新开一终端:
rosrun turtlesim turtlesim_node
若出现如下图所示,则ROS安装成功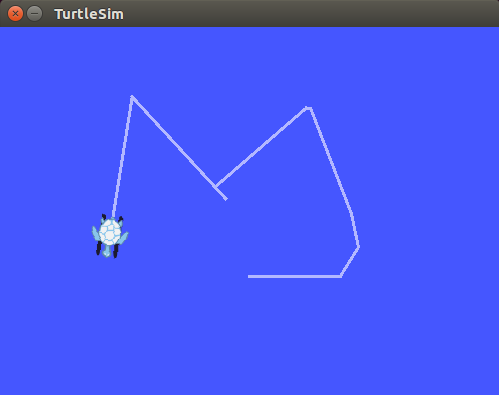
Tips:
如果你发现海龟与图示不一样,不必担忧,turtlesim每次启动海龟样式随机。
ROS开发环境搭建
终端推荐:Terminator
在 ROS 中,需要频繁地使用到终端,且可能需要同时开启多个窗口,推荐一款较为好用的终端:Terminator
sudo apt install terminator
编辑器推荐:VSCode
免费、开源且功能强大的轻量级代码编辑器,此处不多介绍。
1.下载
下载地址:https://code.visualstudio.com/docs?start=true
历史版本下载地址:https://code.visualstudio.com/updates
2.安装
到刚刚下载的vscode安装包所在目录下,打开终端,输入:
sudo dpkg -i xxx(安装包名称).deb
3.安装扩展
使用 VScode 开发 ROS 程序,需要先安装一些扩展,常用扩展如下:
4.卸载
这么好用的东西干嘛要卸载
sudo dpkg --purge code
好了,快开始愉快地学习叭!!