catkin_make
1.catkin编译系统
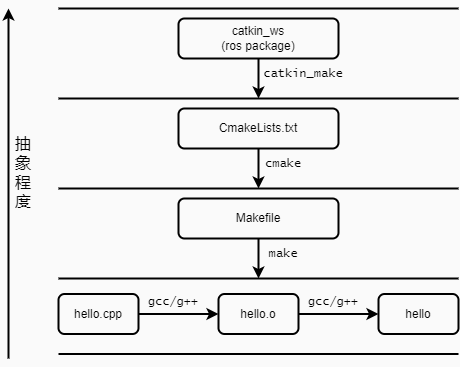
对于源代码包,编译后才能在系统上运行。Linux下,随着源文件的增多,用 gcc/g++ 命令的方式显得效率低下,人们开始用 Makefile 来编译。然而随着工程体量增大,Makefile也不能满足需求,于是便出现了 Cmake 工具。CMake是对make工具的生成器,是更高层的工具,它简化了编译构建过程,能够管理大型项目,具有良好的扩展性。ROS这个大体量的平台,采用的就是CMake,并且ROS对CMake进行了扩展,也就有了 Catkin 编译系统。
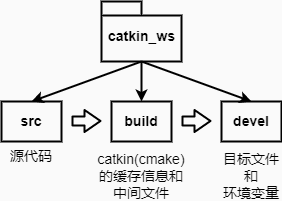
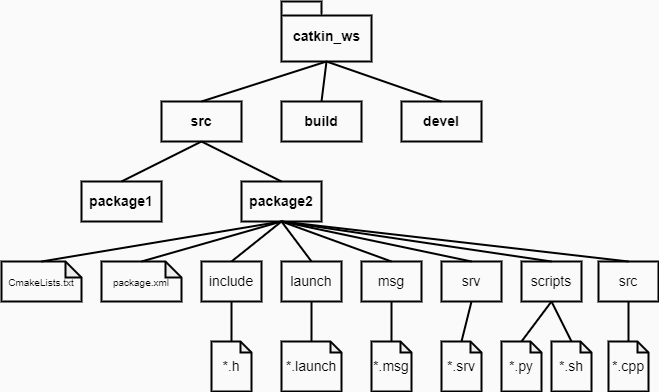
1-1.catkin工作空间
1-2.catkin编译流程
建立工作空间
mkdir -p catkin_ws/src
cd catkin_ws/src
catkin_init_workspace # 可以跳过这步,直接在catkin_ws/下catkin_make
cd ..
catkin_make
编译
cd catkin_ws
catkin_make
source ./devel/setup.bash # 编译完成后要source刷新环境
若要手动执行catkin_make操作,等效命令为:
cd catkin_ws/src
catkin_init_workspace
cd ..
mkdir build
cd build
cmake ../src -DCMAKE_INSTALL_PREFIX=../install -DCATKIN_DEVEL_PREFIX=../devel
make
如果要在工作空间中编译指定的包,执行以下命令:
catkin_make -DCATKIN_WHITELIST_PACKAGES=“package1;package2”
如果要还原为编译所有包,执行以下命令:
catkin_make -DCATKIN_WHITELIST_PACKAGES=“”
创建功能包
cd catkin_ws/src
catkin_create_pkg <package> [depend1] [depend2] [depend3]
# e.g. catkin_create_pkg test_pkg roscpp rospy std_msgs
1-3.catkin_make命令参数
catkin_make -h
自己看去吧。